由麻省理工,谢菲尔德大学及东京工业大学共同研发完成的可折叠机器人,它能遇热自动伸展,可以作为医用胶囊,通过外部的磁铁控制其行动方向,可以爬进你的胃里,把你误吞食的电池取出,甚至修补人体内的破洞。
这项发明在本周举行的纽约国际机器人和自动化大会上正式亮相,有大量的科研人员参与这项折叠机器人的研究并发表了一篇重量级论文。科研人员包括麻省理工的电气工程和计算机科学系教授 Andrew Viterbi 以及研究组组长 Daniela Rus。
“这种可折叠式机器人令我们非常兴奋,我们相信它在健康医疗领域将发挥重要作用”。 麻省理工的计算机科学及人工智能研究室(CSAIL)主管 Rus 对记者说。“对于应用在人体内的机器人,我们必须让它尽量精巧,可控,这就必须有传统机器人以外的创意。如果让机器人由一条绳子控制,让它准确地在人体内行动是非常困难的”。
这篇论文的第一作者 Shuhei Miyashita 邀请了 CSAIL 博士后 Rus 参与这项计划,Rus 在完成这个项目之后,去了英国的约克大学任电子系讲师。机械工程本科生 Steven Guitron ,CSAIL 博士后 Shuguang Li ,恰好在麻省理工进行学术交流的东京工业大学学生 Kazuhiro Yoshida 以及谢菲尔德大学的 Dana Damian 同样参与了这个项目。
虽然它的前一代产品在去年同一时间发布,但它们的材料设计有了很大的差异。与它的前辈一样,它可以通过粘滑运动移动自身,通过其附属物的收缩,改变其重量分布进行移动。

和由 Rus 负责的前一代产品相似,新的机器人采用三层结构,中间层会遇热收缩,上下两层也会受中间层的影响产生形变。
材质变化
机器人的设计形态经过了无数次的修改,最终成为今天的形状。“想要机器人能够正常蠕动,必须满足以下条件:1.机器人尽可能的小 2.机器人足够‘硬’”。Guitron 解释。“最初设计时才用聚酯薄膜材料,比我们现在采用的生物材料更硬,但可能对人体产生不适”。
为了补偿生物材料的刚性不足,研究人员提出一项新的设计,通过折叠成多层增加机器人的硬度。同时,收缩形成的褶皱也能提高机器人的抗压性。
但由于胃里面充斥着液体,机器人的运动并不能完全依赖蠕动。“经过我们计算,我们需要依赖水进行 20%的移动,其他 80% 则是用蠕动”,Miyashita 说。“既然如此,我们就选择把机器人设计成鳍型,正如你所见,它看起来比较扁平”。
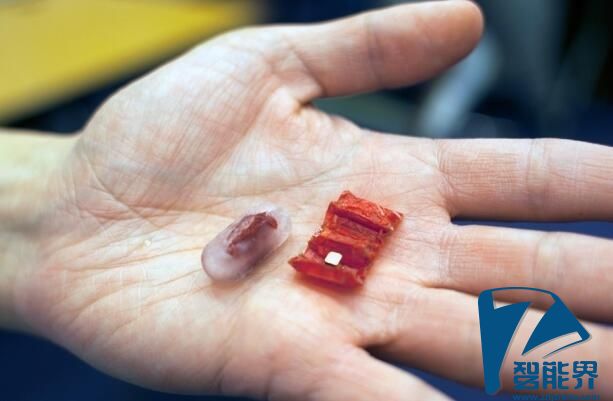
它的设计还需要考虑到胶囊外壳问题,毕竟它由病人口服进体内,所以它的体积被尽可能的压缩到最小。同时,胶囊进入体内溶解后,它还要有足够的力让自己伸展开来,才能顺利进行收缩移动。Guitron 说他们试了无数的错,才找到了长方形的机器人形态,并像手风琴一样折叠多层,将其长轴和捏脚线充当牵引点。
负责向前进的一个“手风琴”中心使用的是一块永磁体,借此可以在身体外部控制机器人移动。放在体外的控制器能够使机器人旋转移动,在实验中,他们采用同一块磁体吸附住误吞进体内的电池。
用猪做实验
研究人员使用干燥后的猪大肠做了大量可行性试验。“我们在亚裔市场和唐人街上花费了大量的时间寻找合适的材料”,李说。机器人的收缩层是用一种可降解的材料,名为 Biolefin 。
要设计一个合成的胃,研究人员买了一个猪肚并测试了其可靠性。他们的模型是胃和食道,从硅橡胶具有相同的机械轮廓成形的开口横截面。水和柠檬汁的混合模拟在胃的酸性液体。
每年,尽在美国,就有 3500 例纽扣电池被误吞的报告。通常,纽扣电池能被消化掉,但如果它们进入了食道或者胃里,它们将电离出氢氧化物,这将会对器官产生极大的伤害。Miyashita 采取了聪明的策略说服 RUS ,把取消传统的手术,让折纸机器人搞定这些病人。
“Shuhei 买了一块火腿肉,并把电池放在肉上面”,Rus 说,“半小时后,电池完全溶解在了肉上面 。这让我意识到了,这件事非同小可,如果你不小心把电池放进了你身体里,你最好尽快把它弄出来,越快越好”。
“这项发明非常实用又兼具创造力,它让原本需要动用外科手术的问题优雅地解决”。瑞士联邦理工学院教授 Bradley Nelson 这样评价道,“这是我目前见到的,折叠型机器人目前为止最有说服力的应用”。
智能界(www.znjchina.com)中国智能科技聚合推荐平台,秉承“引领未来智能生活”的理念,专注报道智能家居、可穿戴设备、智能医疗、机器人、3D打印、智能汽车等诸多科技前沿领域。聚合品牌宣传、代理招商、产品评测、原创视频、FM电台与试用众测,深入智能硬件行业,全平台多维度为用户及厂商提供服务,致力成为中国最具影响力的智能硬件聚合推荐平台。
评论列表(已有条评论)
最新评论